Graph-based Cluttered Scene Generation and Interactive Exploration using Deep Reinforcement Learning
We introduce a novel method to teach a robotic agent to interactively explore cluttered yet structured scenes, such as kitchen pantries and grocery shelves, by leveraging the physical plausibility of the scene. We propose a novel learning framework to train an effective scene exploration policy to discover hidden objects with minimal interactions.
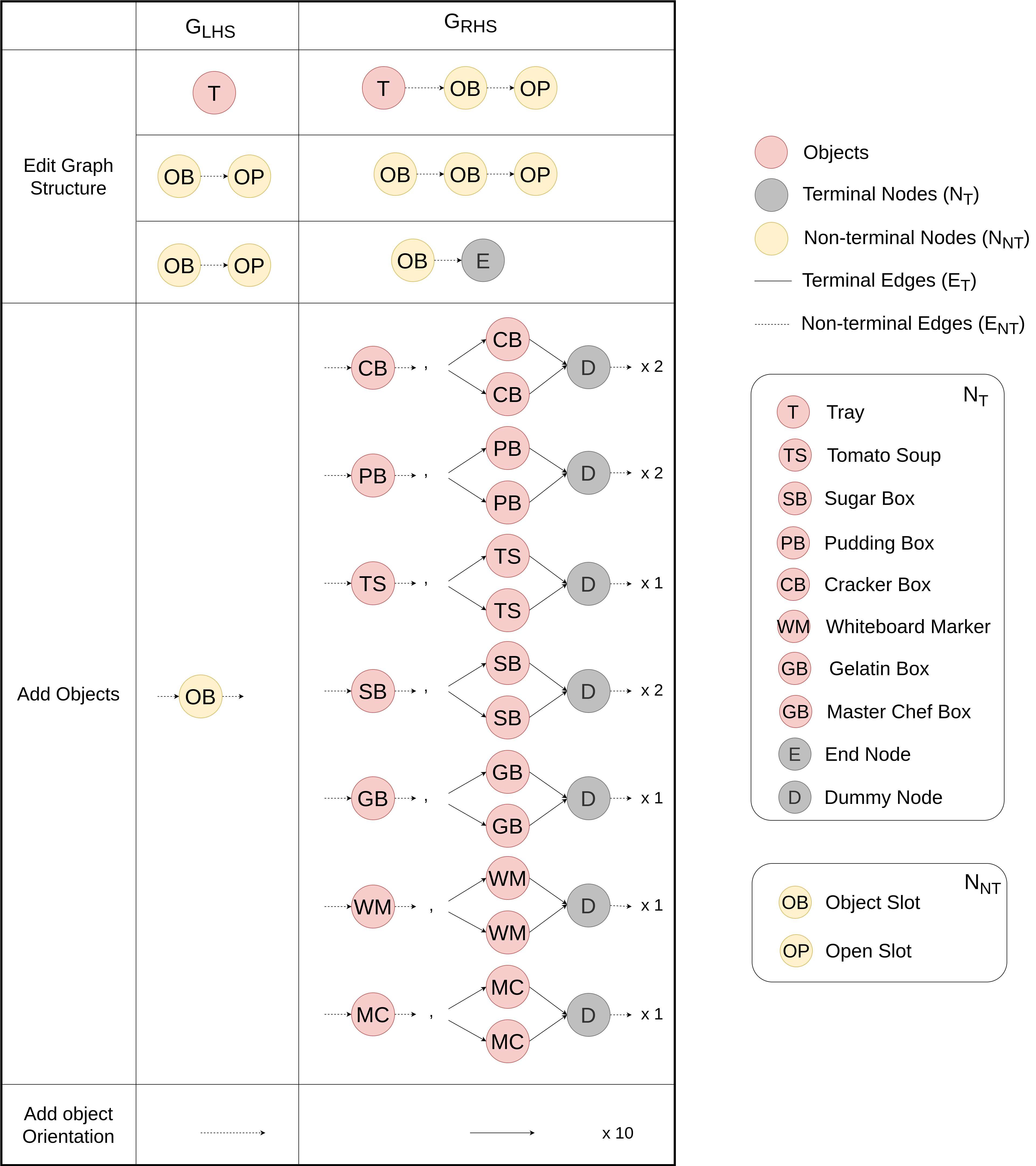
First, we define a novel scene grammar to represent structured clutter. Then we train a Graph Neural Network (GNN) based Scene Generation agent using deep reinforcement learning (deep RL), to manipulate this Scene Grammar to create a diverse set of stable scenes, each containing multiple hidden objects.
Given such cluttered scenes, we then train a Scene Exploration agent, using deep RL, to uncover hidden objects by interactively rearranging the scene.
Grammar Rules
Below is a list of all the grammar rules used in our experiments (7 objects)
Links:
14 object dataset source: https://www.turbosquid.com/3d-models/3d-model-supermarket-shelves-pack-pasta/1089057